Ce sont les moteurs alimentés en 6V (\(P_u = 5W\)), 12V (6W) ou 24V (8W) dont la référence est du type JGAXX-YYY.
XX (12, 16, 20, 25, 28, 37, 42, 55) désigne le diamètre du réducteur et YYY la série du moteur.
Série
Dimensions (Ø × L)
Tensions typiques
030
Ø12 × 15–18 mm
3 V / 6 V
050
Ø15–18 × 20–25 mm
3 V / 6 V / 12 V
130
Ø20 × 25–30 mm
3 V / 6 V
180
Ø24 × 30–35 mm
6 V / 12 V
260
Ø24–26 × 35–40 mm
6 V / 12 V
370
Ø24 × 24–30 mm
6 V / 12 V
520
Ø27 × 30–35 mm
6 V / 12 V
540
Ø35 × 45–50 mm
6 V / 12 V / 24 V
550
Ø36 × 50–55 mm
12 V / 24 V
555
Ø36 × 55–60 mm
12 V / 24 V
775
Ø42 × 65–70 mm
12 V / 24 V
Moteur N
J’ai découvert ces petits moteurs avec le projet SMARS. La série N (N10, N20, N30, N40, N50) désigne des moteurs à courant continu (DC) rectangulaires (≈ 12 × 10 mm) et compacts, très utilisés en robotique miniature et dans les mécanismes de précision.
Modèle
Longueur
Tensions typiques
Atouts
Usages typiques
N10
≈ 12 mm
3 V · 6 V
Ultra-compact, très léger
Gadgets miniatures, très petits mécanismes
N20
≈ 15 mm
3 V · 6 V · 12 V
Excellent rapport encombrement/puissance
Mini-robots, micro-actionneurs, gearboxes 10×12
N30
≈ 20 mm
3 V · 6 V · 12 V
Plus de couple que N20, reste compact
Petits robots un peu chargés, micro-pompes
N40
≈ 25 mm
6 V · 12 V
Couple supérieur, meilleure tenue thermique
Robots compacts plus puissants, mécanismes soutenus
N50
≈ 30 mm
6 V · 12 V
Couple max de la série, moteur endurant
Applications compactes à couple élevé, micro-outillage
Ces moteurs sont souvent vendus avec des réducteurs métalliques :
Type de réducteur
Section boîtier
Longueur réducteur
Arbre de sortie
Rapports disponibles (exemples)
Matériaux / remarques
Usages typiques
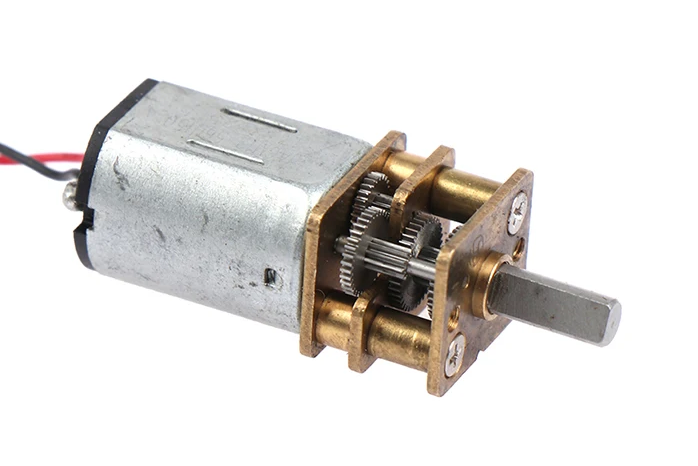
Micro métal (engrenages droits)
≈ 10 × 12 mm
~ identique pour tous les rapports, sauf ~+3,5 mm en 1000:1
Plaques laiton ; trains acier inox trempé ; très répandu
Robots miniatures, mécanismes compacts, châssis type Pololu
Planétaire (micro)
Ø ~16 mm (PG16), longueur variable
Plus long qu’un 10×12 mm à rapport équivalent
Souvent D 3 mm
p.ex. 50:1, 100:1, 200:1… (selon fabricant)
Couple plus élevé, meilleure tenue aux charges
Applications exigeant plus de couple dans un gabarit réduit
Vis sans fin (worm) (certains modèles)
Ø ~12 mm et + (selon gamme)
Variable
Souvent D 3 mm
Rapports élevés (inversibilité réduite)
Auto-freinant, très bon maintien en position
Actionneurs lents, maintien sans alimentation
Notes : 10×12 mm = format classique des micro réducteurs « N20 ». Arbre D 3 mm (≈ 9 mm de long) très courant.
En 1000:1, le boîtier 10×12 mm est ~3,5 mm plus long. Les rapports exacts et matériaux varient selon fabricants.
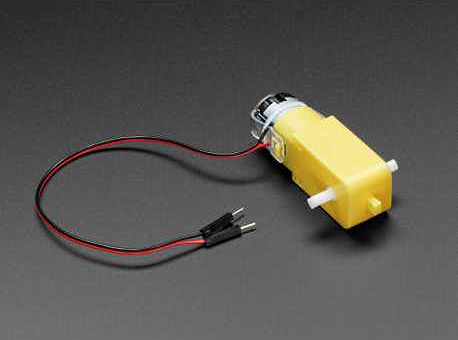
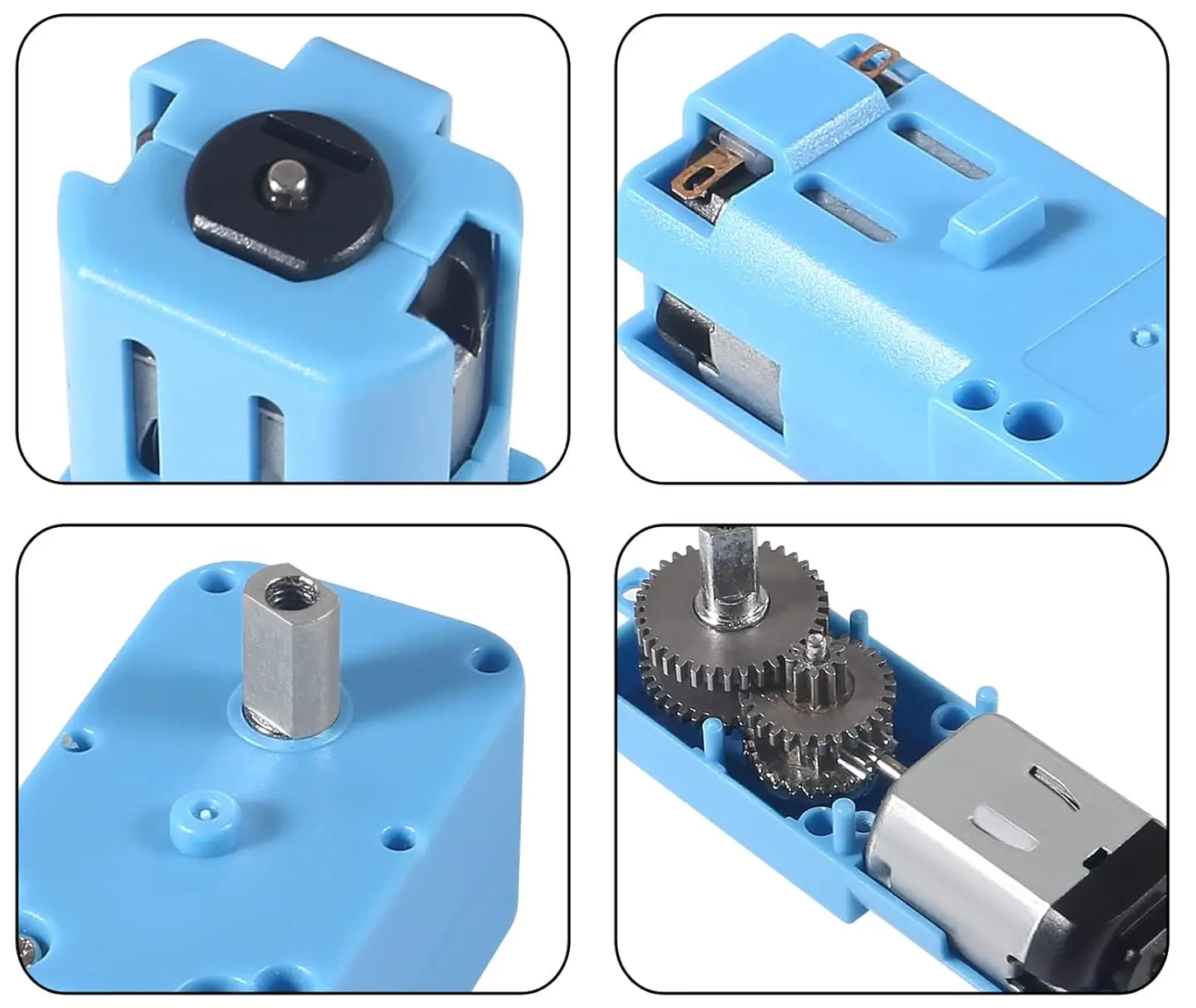
Moteur TT
Les moteurs TT sont des motoréducteurs économiques en plastique que l’on trouve dans énormément de kits éducatifs et de robots Arduino.
Jaune 1:48 → plus rapide, moins de couple → bon pour vitesse (suiveurs de ligne, buggy éducatifs). Robots 2 roues (buggy, suiveur de ligne, évitement d’obstacles)
Plateformes éducatives (Robobox) et kits (Suiveurs de lignes, Sunfounder...).
Bonne vitesse, mais couple limité → robot assez rapide mais pas fait pour tracter lourd
Bleu 1:90 → plus lent, plus de couple → bon pour force (robots plus lourds, bras robotisés).
Robots nécessitant plus de force (bras robotisés simples, véhicules lents)
Bonne stabilité, meilleure capacité à porter du poids que le jaune
Mais vitesse plus faible → robot plus lent mais plus robuste
Caractéristique
1:48 (jaune)
1:90 (bleu)
Rapport de réduction
1:48
1:90
Tension d’usage
3–6 V (jusqu’à 9 V)
3–6 V (jusqu’à 9 V)
Vitesse à vide (6 V)
≈ 200 tr/min
≈ 120 tr/min
Couple nominal
≈ 0,8 kg·cm
≈ 1,5 kg·cm
Courant en charge
≈ 150–250 mA
≈ 150–250 mA
Courant de blocage
≈ 1 A
≈ 1 A
Dimensions (boîtier)
≈ 70 × 23 × 18 mm
≈ 70 × 23 × 18 mm
Usages typiques
Buggy rapides, suiveurs de ligne
Robots lents/chargés, petits bras
Au final, le moteur reste le même, seul le réducteur change. Les roues dentées du réducteur des moteurs jaune est en plastique, celles des moteurs bleu sont en métal.
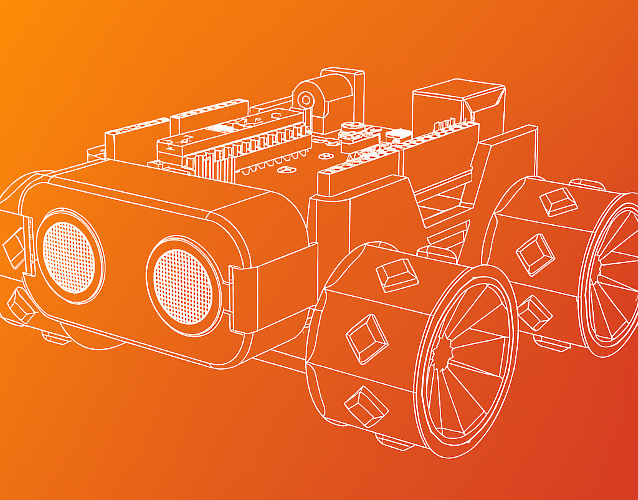
SMARS
SMARS est un robot simple conçu pour le domaine éducatif. Ses principales caractéristiques sont le nombre réduit de composants, la possibilité de l’assembler sans vis et sans souder aucune pièce, l’absence de colle ou d’adhésif similaire, et un coût de construction très faible. Un autre point important de SMARS est sa conception modulaire : vous pouvez y installer différents capteurs et outils, et concevoir vos propres pièces. SMARS = Screwed/Screwless Modular Assembleable Robotic System.
Monter un kit c'est sympa, mais tout faire soi-même de A à Z : c'est formateur ! La copie du Penguin Bot me permet de m'exercer à l'utilisation du logiciel de CAO OpenSCAD (gratuit) et de concrétiser le projet à l'aide mon imprimante 3D (Creality Ender 3 Pro).
Penguin Bot est un petit robot bipède de chez ELEGOO, basé sur une Arduino Nano, avec de nombreuses possibilités d'évolutions. On peut le reprogrammer comme on le souhaite. STEM (Science, Technology, Engineering, and Mathematics), ou STIM en français.
Premier petit kit de robot. C'est un suiveur de ligne (Line Follower Robot), très sommaire, dont le comportement n'est pas géré par un microcontrôleur, mais un par comparateur analogique.